TJA1050トランシーバーのセットアップおよび構成ガイド
TJA1050は、CANプロトコルコントローラーを物理バスに接続するCANトランシーバーであり、高速ネットワークでデータを転送するための信頼性が高く、高速で安定した方法を提供します。この記事では、その機能、セットアップ、および実用的な用途をカバーしているため、TJA1050がデータ通信をどのように強化するかを簡単に理解できるようになりました。カタログ
TJA1050の概要
TJA1050 CANプロトコルコントローラーと物理バスの間のリンクとして機能し、これらのポイントをスムーズに移動する方法を作成します。高速環境では信頼できるソリューションであり、高速で一貫したデータ転送が必要なシステムに適しています。この設計は、電磁放射を最小限に抑えるため、システムの他の部分の干渉を防ぐのに役立ちます。この機能は、他のコンポーネントが密接に詰め込まれているネットワークで特に価値があり、排出量を減らすことで、これらの部品が混乱なしに機能することができます。
ノードが容認されていない場合、TJA1050は安定性を維持し、ネットワーク全体が影響を受けないようにします。以前のトランシーバーとは異なり、このモデルはスタンバイモードをスキップしているため、システムの一部がネットワークの残りの部分に影響を与えることなく、システムの一部が時々パワーダウン状態に入る可能性がある部分的に動力のあるネットワークに最適です。この機能により、システムが途切れない接続を必要とする自動車や産業の設定で特に役立ちます。
TJA1050ピン構成
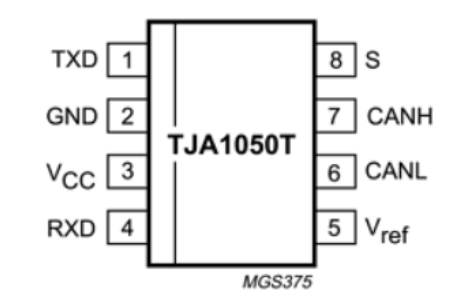
| シンボル | ピン | 説明 |
| TXD | 1 | データ入力を送信します。缶コントローラーからバスラインドライバーへのデータを読み取ります |
| GND | 2 | 地面 |
| VCC | 3 | 供給電圧 |
| RXD | 4 | データ出力を受信します。バスラインから缶コントローラーまでのデータを読み取ります |
| vref | 5 | 参照電圧出力 |
| カンル | 6 | 低レベルのバスライン |
| キャン | 7 | 高レベルのバスライン |
| s | 8 | 高速モードまたはサイレントモードの入力を選択します |
TJA1050 CADデザイン
TJA1050 CADシンボル

TJA1050 PCBフットプリント
TJA1050 3Dモデル設計
TJA1050の主要な機能
高速データ送信
TJA1050は、最大1 MBaudに到達する迅速なデータ送信を可能にします。つまり、迅速で信頼できる通信が優先事項である高速ネットワークを処理できます。この機能は、自動車や産業ネットワークなど、継続的で高性能データ交換を必要とする設定で特に役立ちます。
ISO 11898標準のコンプライアンス
TJA1050はISO 11898標準を満たしており、他の缶ベースのシステムとの互換性を確保しています。このコンプライアンスは、互換性の問題なくさまざまなネットワークに統合できることを意味し、さまざまなプロジェクトに多用の選択肢になります。
低電磁放出(EME)
電磁放射設計が低いため、TJA1050は近くの電子デバイスとの干渉のリスクを減らすのに役立ちます。この機能により、自動車や産業の設定など、デバイスが密接に間隔を空けている環境でも、トランシーバーが効果的に動作することができます。
電磁免疫のための広いコモンモード範囲(EMI)
TJA1050の広範なコモンモード範囲は、電磁干渉に対する免疫を改善し、高い電磁ノイズを備えた環境で安定した性能を維持するのに役立ちます。この安定性は、データ送信が外部障害の影響を受けないようにするために不可欠です。
無力なノードの安定性
TJA1050のユニークな利点の1つは、一部のノードが無効になっていても、缶バスを安定させる能力です。この機能は、ネットワークの一部が時々電源を入れる可能性があるアプリケーションで価値があり、システムの残りの部分が混乱なしに機能することができます。
データ(TXD)ドミナントタイムアウトを送信します
TXDドミナントタイムアウト関数は、支配的な状態が長すぎる場合、送信を自動的に停止することにより、伝送エラーを防ぎます。この機能は、ネットワークを意図しない干渉や信号の破壊から保護し、全体的なネットワークの安定性をサポートします。
サイレントモード
サイレントモード機能により、トランスミッターを無効にすることができ、TJA1050を監視や診断に最適にします。これにより、デバイスは信号を送信せずにネットワークアクティビティを観察することができます。これは、進行中のデータトラフィックの乱れを避ける必要があるシステムで役立ちます。
自動車の過渡現象に対する保護
TJA1050には、自動車の過渡現象に対する組み込みの保護が含まれており、突然の電圧スパイクから保護します。この耐久性により、さまざまな電気システムのために電圧の変動が一般的である車両では、トランシーバーが確実に動作できるようになります。
3.3Vおよび5Vデバイスとの互換性
3.3Vデバイスと5Vデバイスの両方と互換性があるTJA1050は、さまざまなシステムでうまく機能し、電圧互換性の懸念なしにトランシーバーをプロジェクトに設計および統合する柔軟性が得られます。
熱および短絡保護
TJA1050には、熱保護と短絡回復力が装備されており、バッテリーまたは地面への過熱および偶発的な接続から守ります。これらの機能により、デバイスの耐久性が向上し、安全性とパフォーマンスの需要が高いアプリケーションで信頼できる選択肢になります。
最大110ノードをサポートします
最大110のノードをサポートすることで、TJA1050はネットワーク内の多くのデバイスを接続でき、大規模なシステムに適しています。この能力は、ネットワークを過負荷せずに多くのデバイスが効果的に通信する必要があるアプリケーションで有益です。
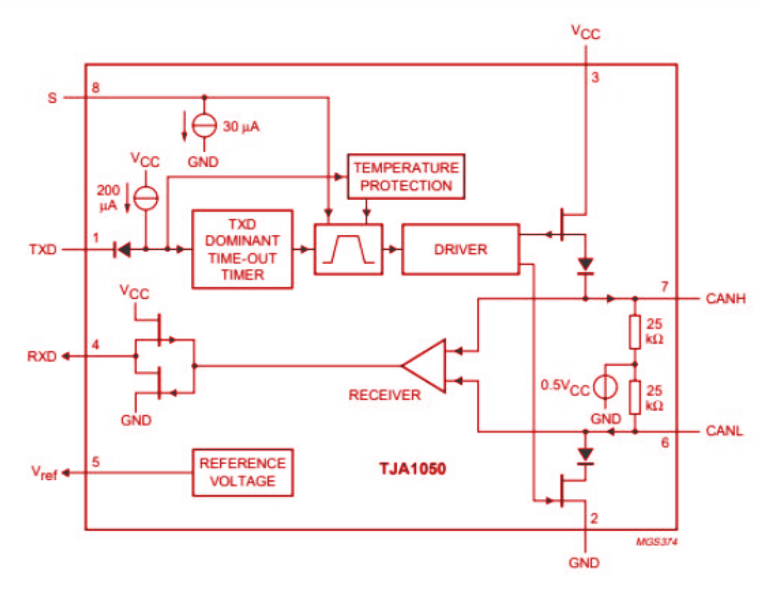
TJA1050機能ブロック図
TJA1050のブロック図は、このコンポーネントがデータフローを管理する方法を視覚的に表しています。トランシーバーがデータ信号を送信および受信する方法を示し、Canh(高レベル)とCanl(低レベル)のライン間のバランスの取れた出力を維持します。このバランスは、電磁干渉を制御するための鍵であり、デバイスが高いデータレートを簡単に処理できるようにします。ブロック図の各セクションは、データの処理方法と送信方法を示しています。これにより、デバイスの全体的な操作を理解するのに役立ちます。
柔軟性を備えて設計されており、ISO 11898を含む缶の標準に準拠しながら最大1 Mbaudの速度を処理します。このアプローチにより、TJA1050はさまざまなアプリケーションにシームレスに適応でき、高速データ通信環境でのデバイスの機能と安定性が示されます。
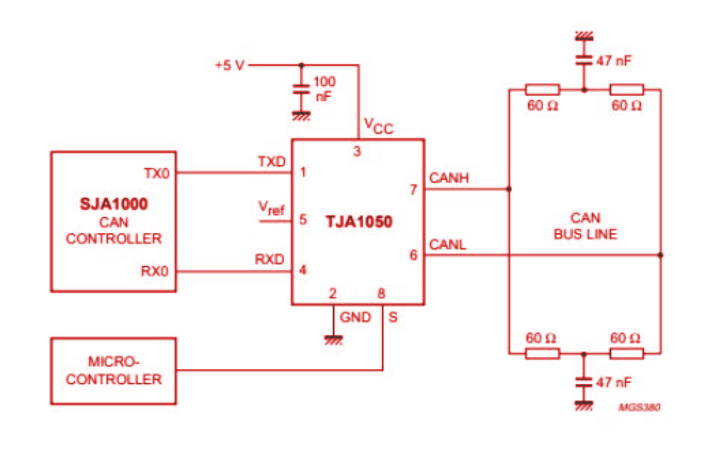
TJA1050回路とアプリケーション
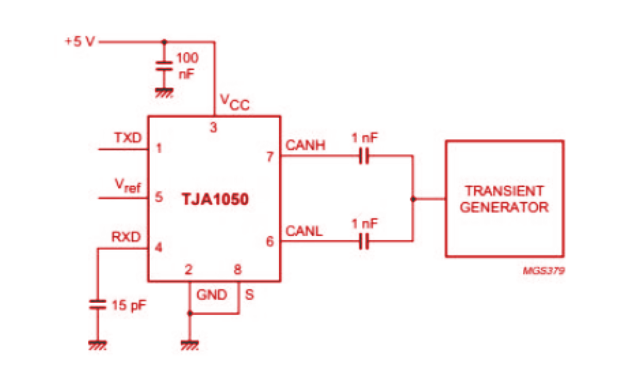
TJA1050自動車の過渡試験回路
TJA1050仕様
NXP USA Inc. TJA1050T/N、118の技術仕様、属性、パラメーター、および同等の部品。
| タイプ | パラメーター |
| 取り付けタイプ | 表面マウント |
| パッケージ /ケース | 8-SOIC(0.154、3.90mm幅) |
| 表面マウント | はい |
| 動作温度 | -40°C〜150°C |
| パッケージング | テープ&リール(TR) |
| 公開 | 2002年 |
| JESD-609コード | E0 |
| パーツステータス | 廃止 |
| 水分感度レベル(MSL) | 1(無制限) |
| 終端の数 | 8 |
| タイプ | トランシーバー |
| HTSコード | 8542.39.00.01 |
| 電圧 - 供給 | 4.75V〜5.25V |
| 端子位置 | デュアル |
| 端子形式 | カモメの翼 |
| ピークリフロー温度(CEL) | 指定されていない |
| 関数の数 | 1 |
| 供給電圧 | 5V |
| 端子ピッチ | 1.27mm |
| time@peakリフロー温度 - マックス(s) | 指定されていない |
| ベースパーツ番号 | TJA1050 |
| ピンカウント | 8 |
| JESD-30コード | R-PDSO-G8 |
| 資格ステータス | 資格がない |
| 電源 | 5V |
| 電流電源を供給します | 0.075mA |
| データレート | 1000 Mbps |
| プロトコル | カンバス |
| ドライバー/レシーバーの数 | 1/1 |
| 二重 | 半分 |
| レシーバーヒステリシス | 70mv |
| トランシーバーの数 | 1 |
| 長さ | 4.9mm |
| 身長が座っている(最大) | 1.75mm |
| 幅 | 3.9mm |
| ROHSステータス | ROHS3準拠 |
よくある質問[FAQ]
1. TJA1050とMCP2551の違いは何ですか?
TJA1050とMCP2551はどちらもCANプロトコルコントローラーと物理缶バスの間のインターフェイスとして機能しますが、独自の機能があります。TJA1050は、高速缶ネットワーク向けに設計されており、コントローラーとバス間の微分伝送と受信をサポートしています。システムの残りの部分に影響を与えることなく、ノードが電源を下げることができるネットワークに適しています。一方、MCP2551は高速缶もサポートしていますが、その障害トレランスで知られており、EMIやESDなどの外部ソースによって引き起こされる高電圧スパイクからコントローラーを保護します。この機能は、特に電気騒音の発生策で、バスの安定性の余分な層を提供します。
2。典型的な電圧レベルは何ですか?
バスの電圧レベルは、ラインによって異なります。Canh(High)ラインでは、電圧は通常、アイドル時に2.5〜3.5ボルト、通常は操作中に約2.7〜3.3ボルトになります。CANL(低)ラインでは、通常、電圧は、アイドル状態の場合は1.5〜2.5ボルトの範囲で、実行条件では1.7から2.3ボルトの範囲です。これらのレベルは、CANバスでの信頼できるデータ送信に必要な明確な微分信号を維持するのに役立ちます。
3。TJA1050はどのような条件下で動作しますか?
TJA1050は、4.75V〜5.25Vの供給電圧範囲内で動作します。長さ22.0 mm、幅11.5 mm、高さ3.3 mmのコンパクトなモジュールで、重量は約0.8〜1.0グラムです。TJA1050は最大110ノードをサポートできるため、複数のデバイスがシームレスに通信する必要がある大きな缶ネットワークに適しています。
4。ラズベリーPIは缶バスと通信できますか?
Raspberry Piには組み込みの缶バスインターフェイスは付属していませんが、GPIOピンにSPIバスが含まれており、多くの缶コントローラーによって広くサポートされています。SPIバスでは、MOSI(マスターアウトスレーブイン)、味o(スレーブアウトマスター)、SCLK(シリアルクロック)、およびCS(チップセレクト)の4つの接続を使用し、Raspberry PIがCANトランシーバーモジュールとのインターフェイスを可能にします。。
5. MCP2515は、TJA1050ドライバーとSPIインターフェイスとのバスコントローラーインターフェースをどのようにできますか?
MCP2515 CANモジュールは、TJA1050トランシーバーと組み合わせて、SPIインターフェイスを介して通信できるようにします。このモジュールは、can v2.0b標準を満たしており、最大1 Mbpsのデータレートをサポートしています。5V DC電源で動作し、信号の安定性のために120Ω終端抵抗を備えた8MHzのクリスタル発振器を備えています。ArduinoなどのマイクロコントローラーのSPIインターフェイスに接続することにより、このモジュールにより、CANバスデバイスをシームレスに制御できるようになり、長距離データ伝送と信号放射防止のアプリケーションが可能になります。
関連情報
ALLELCO LIMITED
もっと見る
クイックお問い合わせ
お問い合わせを送ってください、すぐに返信します。
LT1085低ドロップアウト電圧レギュレーター
10/29/2024で公開されています

すべてのLMV358運用アンプについて
10/29/2024で公開されています
ホットポスト
-
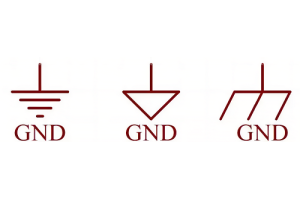
回路のGNDとは何ですか?
01/1/1970で公開されています 2926
-

RJ-45コネクタガイド:RJ-45コネクタカラーコード、配線スキーム、R-J45アプリケーション、RJ-45データシート
01/1/1970で公開されています 2484
-

ファイバーコネクタタイプ:SC対LCおよびLC対MTP
01/1/1970で公開されています 2075
-
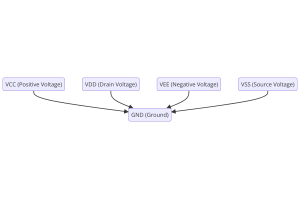
エレクトロニクスVCC、VDD、VEE、VSS、およびGNDの電源電圧の理解
11/8/0400で公開されています 1868
-

DB9とRS232の比較
01/1/1970で公開されています 1757
-

LR44バッテリーとは何ですか?
そのユビキタスな力は、些細なガジェットから生命を脅かす医療機器まで、私たちの日常生活のあらゆる側面に静かに浸透し、静かな役割を果たします。しかし、このエネルギーを本当に把握し、特にそれを保存して効率的に出力する方法は、簡単な作業ではありません。この背景に反して、この記事は、表面上では重要ではないように見えるかもしれないが、実際の用途、つまりLR44バッテリーでは非常に用途が広いものになる可能性のあるコ...01/1/1970で公開されています 1706
-
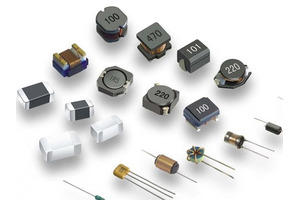
基礎を理解する:インダクタンス抵抗、および副次的
電気工学の複雑なダンスでは、基本的な要素のトリオが中心的な舞台、つまりインダクタンス、抵抗、静電容量です。それぞれが、電子回路の動的なリズムを決定するユニークな特性を備えています。ここでは、これらのコンポーネントの複雑さを解読し、広大な電気オーケストラ内でそれらの明確な役割と実用的な使用を明らかにするための旅に着手します。インダクタンス、その磁束魔法のwizardry;抵抗、電流の流れの不動の門番;電荷のア...01/1/1970で公開されています 1649
-

CR2430バッテリー包括的なガイド:仕様、アプリケーション、およびCR2032バッテリーとの比較
CR2430バッテリーとは何ですか?CR2430バッテリーの利点規範CR2430バッテリーアプリケーションCR2430相当CR2430対CR2032バッテリーCR2430サイズCR2430と同等物を購入するときに何を探すべきかデータシートPDFよくある質問 バッテリーは小さな電子機器の中心です。利用可能な多くのタイプの中で、コイン細胞は、計算機、リモートコントロール、および時計によく見られる重要な役割を果たします。サイズが小さいにもかかわらず、各コ...01/1/1970で公開されています 1536
-
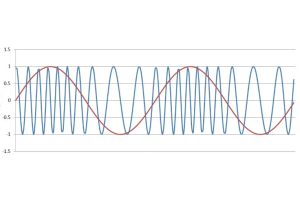
RFとは何ですか?なぜそれを使用するのですか?
無線周波数(RF)テクノロジーは、最新のワイヤレス通信の重要な部分であり、物理的な接続なしで長距離にわたってデータ伝送を可能にします。この記事では、RFの基本を掘り下げ、電磁放射(EMR)がRF通信を可能にする方法を説明します。EMRの原則、RF信号の作成と制御、およびそれらの幅広い用途を探ります。この記事では、RFテクノロジーの歴史的なマイルストーン、関係する技術的課題、および信頼できるRFコミュニケーションを確...01/1/1970で公開されています 1529
-

CR2450対CR2032:代わりにバッテリーを使用できますか?
リチウムマンガンバッテリーには、他のリチウム電池といくつかの類似点があります。高エネルギー密度と長いサービス寿命は、彼らが共通している特性です。この種のバッテリーは、独自の安全性のために多くの消費者の信頼と好意を獲得しています。高価なハイテクガジェット?私たちの家に小さな電化製品?周りを見回すと、どこにでも表示されます。これらの多くのリチウムマンガンのバッテリーの中で、CR2450バッテリーとCR2032バッ...01/1/1970で公開されています 1497
ホットパーツ番号
-

CL03C220JA3ANNC
Samsung Electro-Mechanics
CAP CER 22PF 25V C0G/NP0 0201
RT9526AGE
Richtek USA Inc.
IC BATT CHG LI-ION 1CELL SOT23-6
PTH03010WAH
Artesyn Embedded Power
DC DC CONVERTER 0.8-2.5V 37W
BC858BW
Diotec Semiconductor
BJT SOT-323 30V 100MA
CGA6L2NP01H333J160AA
TDK Corporation
CAP CER 0.033UF 50V NP0 1210
06031C221J4T2A
KYOCERA AVX
CAP CER 220PF 100V X7R 0603
2SK2158-T2B-A
Renesas Electronics America Inc
SMALL SIGNAL N-CHANNEL MOSFET
GBU2508
Yangzhou Yangjie Electronic Technology Co.,Ltd
RECT BRIDGE 800V 25A GBU
INA126U
Texas Instruments
IC INST AMP 1 CIRCUIT 8SOIC
5KP48CA
Diotec Semiconductor
TVS D8X7.5 48V 5000W BI
12067C153KAT2A
KYOCERA AVX
CAP CER 0.015UF 500V X7R 1206
2N689
Solid State Inc.
TO 48 25 AMP SCR
ADS8557IPM
Texas Instruments
IC ADC 14BIT SAR 64LQFP
ADG708BRUZ-REEL7
Analog Devices Inc.
IC MUX 8:1 4.5OHM 16TSSOP
NL17SV04XV5T2G
onsemi
IC INVERTER 1CH 1-INP SOT553
AC1210JKNPOBBN102
YAGEO
CAP CER 1000PF 500V C0G/NPO 1210
BZY93C22
Solid State Inc.
DO4 20 WATT ZENER DIODES
VE-263-EV
Vicor Corporation
DC DC CONVERTER 24V 150W -

Z0103MNT1G
Littelfuse Inc.
TRIAC SENS GATE 600V 1A SOT223
VHFD37-12IO1
IXYS
RECT BRIDGE 1PH 1200V V1A-PAK
DG390ACWE
Analog Devices Inc./Maxim Integrated
IC SWITCH SPDT X 2 50OHM 16SOIC
PC817X1NSZ0F
SHARP/Socle Technology
OPTOISOLATOR 5KV TRANS 4DIP
ACS722LLCTR-10AU-T
Allegro MicroSystems
SENSOR CURRENT HALL 10A DC
1N5227B
NTE Electronics, Inc
DIODE ZENER 3.6V 500MW
H12D4825-10
Sensata-Crydom
SSR RELAY SPST-NO 25A 48-530V
SN74LVC16T245DGVR
Texas Instruments
IC TRANSLATOR BIDIR 48TVSOP
GRM1555C2A7R6DA01D
Murata Electronics
CAP CER 7.6PF 100V C0G/NP0 0402
IDT71V124SA10TY
Renesas Electronics America Inc
IC SRAM 1MBIT PARALLEL 32SOJ
BZB984-C15,115
Nexperia USA Inc.
DIODE ZENER ARRAY 15V SOT663
0437005.WR
Littelfuse Inc.
FUSE BRD MNT 5A 32VAC 35VDC 1206
TLE2425CDRG4
Texas Instruments
IC VREF GND REF 2.5V 8SOIC
CC0402JRNPO9BN161
YAGEO
CAP CER 160PF 50V C0G/NPO 0402
06035C683KAZ2A
KYOCERA AVX
CAP CER 0.068UF 50V X7R 0603
CSD58882Q5A
Texas Instruments
PROTOTYPE
S-1313A33-A4T1U3
ABLIC Inc.
IC REG LINEAR 3.3V 200MA HSNT4-A
LM2904DT
STMicroelectronics
IC OPAMP GP 2 CIRCUIT 8SOIC -

LM1086CT-ADJ
Texas Instruments
IC REG LINEAR ADJ POS LDO REG
ATL431BQDBZR
Texas Instruments
IC VREF SHUNT ADJ 0.5% SOT23-3
AD9562JP
Analog Devices Inc.
HI SPD IC PWM
BZM55C15-TR
Vishay General Semiconductor - Diodes Division
DIODE ZENER 15V 500MW MICROMELF
BC856BS
Yangjie Technology
SOT-363 PNP+PNP 0.2W -0.1A -80V
TISP4180L3AJR-S
Bourns Inc.
THYRISTOR 145V 100A DO214AC
12061A392F3T4A
AVX Corporation
CAP CER 3900PF 100V NP0 1206
TL317CPWRG4
Texas Instruments
IC REG LIN POS ADJ 100MA 8TSSOP
8532-32L
API Delevan Inc.
FIXED IND 390UH 680MA 770MOHM SM
BFCN-8000+
Mini-Circuits
LTCC BAND PASS FILTER, 7900 - 81
AD9200JRSZ
Analog Devices Inc.
IC ADC 10BIT PIPELINED 28SSOP
DS80C390-FNR+
Analog Devices Inc./Maxim Integrated
IC MCU 8BIT ROMLESS 64LQFP
AD5314ARMZ-REEL7
Analog Devices Inc.
IC DAC 10BIT V-OUT 10MSOP
R1LV5256ESA-5SI#S1
Renesas Electronics America Inc
IC SRAM 256KBIT PAR 28TSOP I
SY10E101JC
Microchip Technology
IC GATE OR/NO QUAD 4INPUT 28PLCC
TPS63024YFFT
Texas Instruments
IC REG BCK BST ADJ 2.12A 20DSBGA
AD80241BBCZ
Analog Devices Inc.
IC OPAMP GP 1 CIRCUIT
CL05B102JB5NNNC
Samsung Electro-Mechanics America, Inc.
CAP CER 1000PF 50V X7R 0402