TB6600HGステッパーモータードライバー:仕様、機能、アプリケーション
カタログ
TB6600HG説明

TB6600HG は、PWMチョッパータイプのシングルチップ双極副鼻腔マイクロスタッピングモータードライバーです。2相、1-2相、W1-2相、2W1-2相、および4W1-2フェーズ励起モードを介して前方および逆回転制御を実現できます。2相双極ステッパーモーターは、低振動、高効率のクロック信号のみによって駆動されます。
代替品と同等物:
• TB6600FG
• L6258EX
TB6600HGの仕様
•パーツステータス:アクティブ
•パッケージ:トレイ
•パッケージ /ケース:HZIP-25
•製造業者:東芝
•供給電流:4.2 Ma
•動作電源電圧:2 V〜5.5 V
•負荷電圧定格:8 V〜42 V
•出力数:2つの出力
•PD-電力散逸:40 w
•取り付けスタイル:スルーホール
•パッケージの長さ/幅/高さ:29.3mm(最大)/4.5mm/15.7mm
•製品カテゴリ:モーター /モーション /イグニッションコントローラーとドライバー
TB6600HGの動作条件
(TA = -30°C〜85°C)
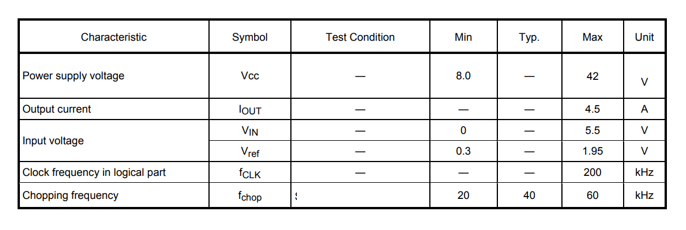
注:2つのVCC端子は、同じ電圧をプログラムする必要があります。出力電流は電力散逸PDによって制限されるため、動作範囲の最大電流は、さまざまな条件に応じて必ずしも実行できません。温度をTJ(Avg。)= 107°Cを超える条件でICを使用しないようにしてください。
42 Vの電源電圧と4.5 Aの出力電流は、動作範囲の最大値です。電源の変動、外部抵抗、およびICの電気特性を考慮して、この範囲内で十分な派生を備えた回路を設計してください。42 Vの電源電圧と4.5 Aの出力電流を超えると、ICは正常に動作しません。
TB6600HGを制御システムに接続する方法は?
電源接続:最初に、TB6600HGに適切な電源を提供してください。TB6600HGに電力を供給する場合、通常、2つのピンを接続する必要があります:VCC(正の電源)とGND(グランドワイヤ)。VCCピンは、チップを駆動するのに必要な電圧を提供する責任があり、GNDピンは参照グラウンドレベルとして機能します。電源が安定しており、TB6600HGの仕様を満たしていることを確認する必要があります。
信号接続:制御システムの特定のニーズに応じて、制御信号をTB6600HGドライバーチップの対応するピンに接続する必要があります。これらの制御信号には通常、方向制御信号とステップパルス信号などが含まれます。これらは、回転方向や回転速度を含むモーターがどのように作用するかを指示する責任があります。
モーター接続:モーターをTB6600HGドライバーチップに接続する際には、特に注意する必要があります。モーターの2つのワイヤー(通常は赤と黒)は、それぞれモーターの正と負の極を表しています。赤いワイヤーは通常、モーターの正の端子に接続し、黒いワイヤーは負の端子に接続します。
フィードバック接続(オプション):エンコーダーがフィードバック制御に使用される場合、エンコーダの出力信号を制御システムに接続する必要もあります。これには通常、フェーズA、フェーズB、およびフェーズZの出力が含まれます(利用可能な場合)。
接地:干渉や損傷を避けるために、すべての機器の共通の接地ワイヤーが正しく接続されていることを確認する必要があります。
初期化設定:接続が完了したら、TB6600HGの設定を初期化して、正しく機能することを確認する必要があります。これには、現在の制限の設定、ステッピングモードなどが含まれます。
TB6600HG製品機能
•拡大したラジエーターを採用して、良好な熱散逸します
•サブディビジョンのセットアップ手順は、ボードの背面に印刷されています
•出力短絡保護機能を使用すると、心配のない使用
•同期を失うことなく高速を確保するために、6N137高速光カップリングを採用する
•出力電流は、さまざまなアプリケーションのニーズを満たすために段階的に調整可能です
•一般的なアノード入力モードを使用すると、2つの入力端子があり、配線がより便利になります
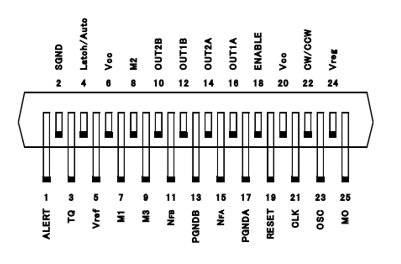
TB6600HGのピン構成
TB6600HGの関数説明
励起設定
励起モードは、M1、M2、およびM3入力を使用して、次の8つのモードから選択できます。モーターの動作中にM1、M2、またはM3入力がシフトすると、新しい励起モードが初期モードから開始され、出力電流波形の連続性が潜在的に破壊されます。
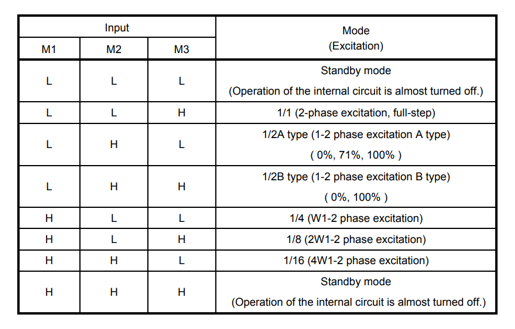
注:M1、M2、およびM3を変更してエキサイティングモードを変更するには、M1 = M2 = M3 = LまたはM1 = M2 = M3 = Hを設定しないようにしてください。
スタンバイモード
操作モードは、M1 = M2 = M3 = LまたはM1 = M2 = M3 = Hの条件下でスタンバイモードに移動します。操作を保護する以外のすべての操作をオフにすることにより、消費電力が最小限に抑えられます。スタンバイモードでは、出力端子MOはHzです。スタンバイモードは、M1 = M2 = M3 = LおよびM1 = M2 = M3 = Hの状態を他の状態に変更することによりリリースされます。スタンバイモードを解放した後、入力信号は約200μsで受け入れられません。
減衰モード
PWMモードで電流を充電および排出すると、通常、OSCMの約5サイクルが必要です。40%の高速減衰モードは、高速減衰モードの最後の2サイクル内で減衰を誘導することにより開始され、40%の比率は一貫して固定されたままです。マスタークロック周波数(FMCLK)、OSCM周波数(FOSCM)、およびPWM周波数(FCHOP)の関係は、次のように示されています。
FOSCM = 1/20×FMCLK
FCHOP = 1/100×FMCLK
ROSC =51kΩの場合、マスタークロック= 4MHz、OSCM = 200kHz、PWM(FCHOP)= 40kHzの周波数。
初期モード
リセットを使用すると、位相電流は次のとおりです。
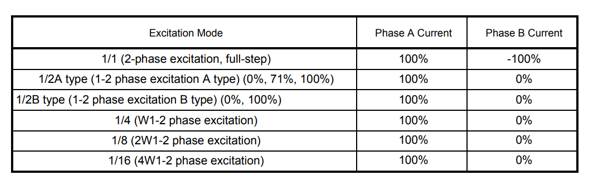
現在の方向は次のように定義されています。
out1a→out2a:前方向
out1b→out2b:前方向
TB6600HGの適用
以下にリストされているのは、TB6600HGのいくつかのアプリケーションです。
•テールライト
•おもてなしの建物
•大きな屋外LEDディスプレイ
•HIDライトに代わるもの
•産業用ハイベイライト
•大きなフォーマットLEDバックライト
•LEDバックライトを表示します
•カメラ対応のスマートフォン
•ステップアップまたはステップダウンドライバートポロジ
TB6600HGの一般的な障害と解
以下には、TB6600HGに関するいくつかの一般的な障害と、障害に遭遇したときに迅速な行動をとり、デバイスの通常の動作を保護するのに役立ついくつかの一般的な障害をリストします。
障害1:ドライバーチップの過熱
TB6600HGチップ自体は、おそらく過度の負荷または熱散逸条件の不良のため、高すぎます。
解決策:熱散逸を強化します
ドライバーチップとモーターにヒートシンクまたはファンを追加して、作業中に熱を完全に消散できるようにする必要があります。同時に、過熱を避けるために、ドライバーのチップとモーターの周りの環境を十分に換気し続ける必要があります。
障害2:モーターは間違った方向に回転します
モーターがドライブ信号を受信した後、回転方向が予想されるものと一致していない場合、制御信号が間違っている場合もあれば、ドライブチップが適切に構成されていない場合があります。
解決策:制御信号を確認します
方向制御信号とパルス信号が正しいことを確認するために、TB6600HGに送信された制御信号を慎重に確認する必要があります。マイクロコントローラーを使用して信号を送信する場合は、プログラムコードとPIN構成を確認してください。
障害3:モーターが回転に失敗します
モーターはドライブ信号を受信した後に反応しません。ドライバーチップが正常に機能していないか、モーターとドライバーチップの間の接続に問題がある可能性があります。
解決策:電源と接続を確認してください
TB6600HGの電源が正常であり、モーターとドライバーチップの間の接続が固体であることを確認する必要があります。マルチメーターを使用して、回路内の電圧と電流を確認して、それらが正常範囲にあることを確認します。
故障4:深刻なモーターヒーティング
モーターは、動作中に過度の熱を発生させます。これは、過度の電流または熱の散逸の不良によって引き起こされる可能性があります。
解決策:現在の設定を調整します
モーターが深刻な熱を生成している場合、ドライバーチップの出力電流を減らすことができます。TB6600HGの現在の設定ピンを調整することにより、出力電流のサイズを効果的に制限し、モーターの負担を軽減し、モーターの安定した安全な動作を保証できます。
よくある質問[FAQ]
1. TB6600HGの動作温度範囲はどれくらいですか?
TB6600Hgの動作温度は、-30°Cから85°Cの範囲です。
2. TB6600HGとは何ですか?
TB6600HGは、CNCマシン、3Dプリンター、ロボット工学、自動化システムなどのさまざまなアプリケーションでステッピングモーターを制御するように設計されたステッパーモータードライバーの一種です。
3. TB6600HGの主要な機能は何ですか?
TB6600HG機能には、調整可能なモーター電流、ステップ解像度設定、組み込みの過熱保護、および信号制御のための光挿入入力が含まれます。