動作中のMPU-6050:セットアップ、構成、ノイズ管理の実用ガイド
カタログ
MPU-6050の紹介
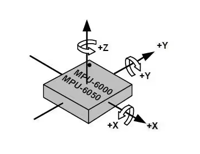
MPU-6050 3軸ジャイロスコープ、3軸アクセルメーター、およびスケーラブルなデジタルモーションプロセッサ(DMP)を統合する世界初の統合された6軸モーション処理コンポーネントです。それを使用する目的は、x、y、z軸の測定するオブジェクトの傾斜角(クワッドコプター、バランスのとれた車など)を取得することです。つまり、ピッチ角、ロール角、ヨー角。I2Cインターフェイスを介して、MPU-6050の6つのデータ(3軸加速AD値と3軸角速AD値)を読み取ります。姿勢融合処理の後、ピッチ、ロール、ヨーの角度を計算できます。測定値の方向参照として、センサー座標方向の定義は、次の図に示すように、右利きの座標系の原理(つまり、右の親指がx-の正の方向を指します。軸、人差し指はy軸の正の方向を指し、中指はz軸の正の方向を指します)。
専用のI2Cセンサーバスを使用して、MPU-6050は外部3軸コンパスから直接入力を受信することができ、9軸MotionFusion™出力を提供します。組み合わせたジャイロスコープとアクセラレーターのタイムラインの間の矛盾の問題を排除し、マルチコンポーネントソリューションと比較してパッケージングスペースを大幅に削減します。3軸磁力計に接続すると、MPU-60X0は、メインI2CまたはSPIポートに完全な9軸モーション融合出力を提供できます(SPIポートはMPU-6000でのみ利用可能であることに注意してください)。
代替品と同等物
•MPU-3300
• MPU-6000
• MPU-6500
MPU-6050のメーカー
MPU-6050のメーカーはTDKです。TDKの2人の創設者であるKato博士とTakei Takeiが東京にフェライトを発明した後、彼らは東京デンキカカクコギョK.K.を設立しました。1935年。グローバルエレクトロニクス業界のブランドとして、TDKは常に電子原材料と電子部品の分野で支配的な地位を維持してきました。TDKの包括的で革新駆動型の製品ポートフォリオは、セラミックコンデンサ、アルミニウム電解コンデンサ、フィルムコンデンサ、磁気製品、高周波成分、圧電および保護デバイス、センサー、センサーシステム(温度や圧力など)などの受動的成分をカバーしています。磁気およびMEMSセンサーなど)など。TDKは、電源とエネルギー装置、磁気ヘッド、その他の製品も提供しています。その製品ブランドには、TDK、EPCOS、Invensense、Micronas、Tronics、およびTDK-Lambdaが含まれます。
MPU-6050の内部ブロック図
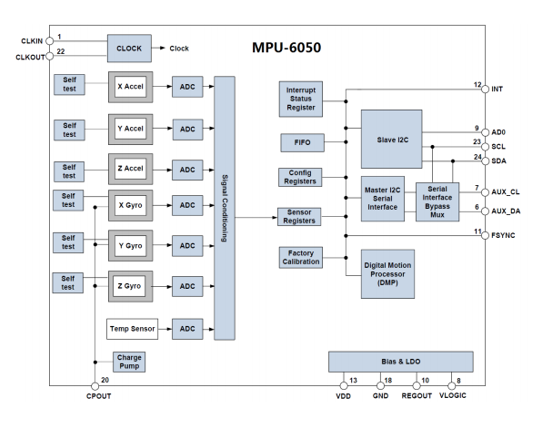
その中で、SCLとSDAはMCUに接続されたIICインターフェイスであり、MCUはこのIICインターフェイスを通じてMPU-6050を制御します。IICインターフェイス、つまりAUX_CLとAUX_DAもあります。このインターフェイスは、磁気センサーなどの外部スレーブデバイスを接続して、9軸センサーを形成するために使用できます。VlogicはIOポート電圧です。このピンは、最低1.8Vをサポートできます。通常、VDDに直接接続します。AD0は、スレーブIICインターフェイス(MCUに接続)のアドレス制御ピンです。このピンは、IICアドレスの最低ビットを制御します。GNDに接続されている場合、MPU-6050のIICアドレスは0x68です。VDDに接続されている場合、0x69です。ここのアドレスには、最低のデータ送信が含まれていないことに注意してください(最低ビットは、読み取り操作を表すために使用されます)。MWBalancedStc15では、AD0がGNDに接続されているため、MPU-6050のIICアドレスは0x68(最低ビットを除く)です。
IICインターフェイスを初期化します
MPU-6050はIICを使用してSTC15と通信するため、最初にMPU-6050に接続されたSDAおよびSCLデータラインを初期化する必要があります。
MPU-6050をリセットします
このステップでは、MPU-6050内のすべてのレジスタがデフォルト値に復元されます。これは、電力管理レジスタ1(0x6b)のビット7から7を記述することで達成されます。リセット後、電源管理レジスタ1はデフォルト値(0x40)に復元され、その後、このレジスタを0x00に設定してMPU-6050を起動し、通常の作業状態に配置する必要があります。
角度速度センサー(ジャイロ)と加速センサーのフルスケール範囲を設定します
このステップでは、2つのセンサーのフルスケール範囲(FSR)をジャイロスコープ構成レジスタ(0x1b)と加速センサー構成レジスタ(0x1c)を介してそれぞれ設定します。通常、ジャイロスコープのフルスケール範囲を±2000dpsに設定し、加速度計のフルスケール範囲を±2gに設定します。
他のパラメーターを設定します
ここでは、次のパラメーターを構成する必要があります。割り込みをオフにし、AUX I2Cインターフェイスを無効にし、FIFOを無効にし、ジャイロスコープサンプリングレートを設定し、デジタルローパスフィルター(DLPF)を構成します。この章のデータを読み取るために割り込みを使用しないため、割り込み関数をオフにする必要があります。同時に、AUX I2Cインターフェイスを使用して他の外部センサーを接続していないため、このインターフェイスを閉じる必要もあります。これらの関数は、割り込みENABLEレジスタ(0x38)およびユーザーコントロールレジスタ(0x6a)を介して制御できます。MPU-6050はFIFOを使用してセンサーデータを保存できますが、この章では使用していないため、すべてのFIFOチャネルを閉じる必要があります。これは、FIFO Enableレジスタ(0x23)を介して制御できます。デフォルトでは、このレジスタの値は0(つまり、FIFOは無効になっている)であるため、デフォルト値を直接使用できます。ジャイロスコープのサンプリングレートは、サンプリングレート分割レジスタ(0x19)によって制御されます。通常、このサンプリングレートを50に設定します。デジタルローパスフィルター(DLPF)の構成は、構成レジスタ(0x1a)を介して完了します。一般的に、データの精度と応答速度のバランスをとるために、DLPFを帯域幅の半分に設定します。
システムクロックソースを構成し、角度速度センサーと加速センサーを有効にします
システムクロックソースの設定は、電源管理レジスタ1(0x6b)に依存します。このレジスタの最低3ビットは、クロックソースの選択を決定します。デフォルトでは、これらの3つのビットは0に設定されています。つまり、システムは内部8MHz RC発振器をクロックソースとして使用します。ただし、クロックの精度を向上させるために、それを1に設定し、X軸ジャイロスコープPLLをクロックソースとして選択します。さらに、角度速度センサーと加速センサーを有効にすることも、初期化プロセスの重要なステップです。両方の操作は、電力管理レジスタ2(0x6c)を通じて実装されます。対応するビットを0に設定して、対応するセンサーをアクティブにするだけです。上記の手順を完了した後、MPU-6050は通常の作業ステータスを入力できます。特別に設定されていないこれらのレジスタは、システムによってプリセットされたデフォルト値を採用します。
MPU-6050はどのように機能しますか?
ジャイロセンサー
センサーには内部のジャイロが装備されています。これは、ジャイロスコープ効果のために常に初期方向に平行なままになります。したがって、最初の方向からジャイロの偏差を検出することにより、回転方向と回転角を計算できます。
加速度計センサー
加速度計センサーは、加速度を測定できるデバイスであり、圧電効果の原理に基づいて機能します。加速中、センサーは質量ブロックに適用された慣性力を測定し、ニュートンの第二法則を使用して加速度値を計算します。
デジタルモーションプロセッサ(DMP)
DMPはMPU6050チップのデータ処理モジュールであり、ジャイロスコープおよび加速度計センサーからデータを取得し、出力四角を処理するためのカルマンフィルタリングアルゴリズムが組み込まれています。この機能は、周辺マイクロプロセッサのワークロードを大幅に削減し、退屈なフィルタリングとデータ融合プロセスを回避します。
注:
Quaternions:Quaternionsはシンプルなスーパーコンプレックス番号です。複雑な数字は、実数と虚数ユニットIで構成されています。ここで、i^2 = -1です。
MPU-6050はどこで使用されますか?
•おもちゃ
•携帯電話とポータブルゲーム
•モーションベースのゲームコントローラー
•Blurfree™テクノロジー(ビデオ/静止画像安定化用)
•AirSign™テクノロジー(セキュリティ/認証用)
•Instantgesture™Ig™ジェスチャー認識
•健康、フィットネス、スポーツ用のウェアラブルセンサー
•モーション対応のゲームおよびアプリケーションフレームワーク
•MotionCommand™テクノロジー(ジェスチャーショートカット用)
•ロケーションベースのサービス、関心のあるポイント、および死んだ計算
•インターネットに接続されたDTVおよびセットトップボックスの3Dリモートコントロール、3Dマウス
•TouchanyWhere™テクノロジー(「タッチなし」のUIアプリケーションコントロール/ナビゲーション用)
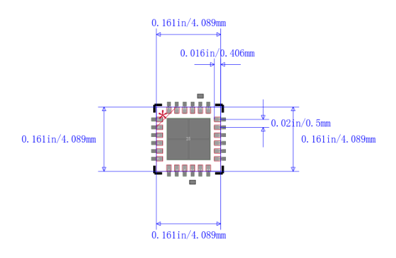
MPU-6050のパッケージ
MPU-6050のノイズを減らす方法は?
MPU-6050のノイズを減らすために、次の方法をとることができます。
キャリブレーションされたセンサーを使用します。MPU-6050の加速度計とジャイロスコープを較正すると、センサー自体のバイアスと誤差がなくなるため、ノイズの効果が低下します。キャリブレーションプロセスは通常、静的キャリブレーションとモーションキャリブレーションの2つの段階で構成されています。
ハードウェアフィルタリングプロセス:MPU-6050の電力線にフィルターコンデンサを追加すると、センサーに対する電源ノイズの影響を減らすことができます。一方、PCBレイアウト中に、高周波信号ラインや高出力成分など、MPU-6050を潜在的な干渉源から遠ざけるようにする必要があります。
ソフトウェアフィルタリング処理:MPU-6050から生データを収集した後、ソフトウェアフィルタリングリンクを追加して初期データを前処理して、ノイズ誘導干渉を排除できます。一般的に使用されるソフトウェアフィルタリング方法には、平均フィルタリング、中央値フィルタリング、カルマンフィルタリングなどが含まれます。
内部ローパスフィルターの使用:MPU-6050には内部統合デジタルローパスフィルターがあります。これは、カットオフ周波数を設定することで高周波ノイズを減らすために使用できます。具体的には、MPU-6050の構成レジスタを変更して、A/Dサンプリングによって引き起こされる高周波ノイズを排除することにより、デジタルフィルターのカットオフ周波数を設定できます。
MPU-6050ベースのモーション軌道計算
MPU-6050は、オブジェクトの動きと態度を測定するために使用できる6軸加速度計およびジャイロスコープセンサーです。MPU-6050に基づくモーション軌道計算は、次の手順で実現できます。
最初のステップは、センサーデータを読み取ることです。適切なドライバーとライブラリ機能を使用して、MPU-6050センサーの加速度計およびジャイロスコープデータを読む必要があります。これらのデータは通常、デジタル形式で出力されるため、物理ユニットの実際の測定に変換するには、コンバージョンとキャリブレーション作業が必要です。
2番目のステップは、加速度を計算することです。まず、加速度計からデータを処理して、各軸のオブジェクトの加速度を導出する必要があります。その後、各軸のオブジェクトの速度と変位を計算するには、加速度データを統合する必要があります。オイラーの方法やLunger-Kuttaメソッドなどの数値統合技術は、このプロセスで多くの場合、変位計算の精度を確保するために使用されます。
3番目のステップは、角速度を計算することです。ジャイロスコープデータを使用して、各軸のオブジェクトの角速度を計算できます。繰り返しますが、このデータは、実際の物理ユニットの角速度を得るために、校正および変換する必要があります。
4番目のステップは、回転を計算することです。角速度データを統合することにより、各軸のオブジェクトの回転角度を計算できます。これは、角度を計算するために、Eulerの方法やLonge-Kuttaメソッドなどの数値統合技術を使用して実行できます。
5番目のステップは、データをマージすることです。アクセラメーターとジャイロスコープからのデータを組み合わせて、オブジェクトの完全な態度と位置情報を取得します。これは、Quaternionベースの姿勢ソルバーやオイラー角ソルバーなどのアルゴリズムを使用して実行できます。
6番目のステップは、結果を視覚化することです。計算されたオブジェクトモーション軌道を3D座標系の一連のポイントに変換し、適切な視覚化ツールを使用して表示して、オブジェクトのモーション軌跡と態度の変化をより直感的に理解します。
よくある質問[FAQ]
1. MPU6050はどれくらい正確ですか?
獲得した結果は、1%未満の十分な精度と信頼性を示し、エレベーターシャフトの適切な寸法とリフト業界の高い基準を保証しました。
2. MPU6050のデータを読み取る方法は?
内部MPU6050レジスタを読み取るために、マスターは開始条件を送信し、その後にi2cスレーブアドレスと書き込みビットが続き、次に読み取られるレジスタアドレスが続きます。
3. MPU6050はどこで使用されますか?
ウェアラブルなヘルス追跡、フィットネス追跡デバイス。ドローンとクアッドコプターでは、MPU6050が位置制御に使用されます。ロボットアームの制御に使用されます。ハンドジェスチャー制御デバイス。
4. MPU6050はIMUですか?
MPU6050 IMUセンサーブロックは、ハードウェアに接続されているMPU-6050センサーからデータを読み取ります。ブロック出力は、センサーの軸に沿った加速、角度速度、および温度を出力します。
5. MPU6050の処理は何ですか?
これは、加速度計とジャイロスコープから来るデータを組み合わせたMPU6050のオンボードプロセッサです。DMPは、MPU6050を使用するための鍵であり、後で詳しく説明します。すべてのマイクロプロセッサと同様に、DMPは実行するためにファームウェアが必要です。
関連情報
ALLELCO LIMITED
もっと見る
クイックお問い合わせ
お問い合わせを送ってください、すぐに返信します。

LM317の詳細なガイド:調整可能な電圧調整器の理解
09/3/2024で公開されています
TL431を理解する:精密シャントレギュレーターの包括的なガイド
09/3/2024で公開されています
ホットポスト
-
回路のGNDとは何ですか?
01/1/1970で公開されています 3108
-

RJ-45コネクタガイド:RJ-45コネクタカラーコード、配線スキーム、R-J45アプリケーション、RJ-45データシート
01/1/1970で公開されています 2672
-
エレクトロニクスVCC、VDD、VEE、VSS、およびGNDの電源電圧の理解
11/15/0400で公開されています 2211
-

ファイバーコネクタタイプ:SC対LCおよびLC対MTP
01/1/1970で公開されています 2182
-

DB9とRS232の比較
01/1/1970で公開されています 1802
-

LR44バッテリーとは何ですか?
そのユビキタスな力は、些細なガジェットから生命を脅かす医療機器まで、私たちの日常生活のあらゆる側面に静かに浸透し、静かな役割を果たします。しかし、このエネルギーを本当に把握し、特にそれを保存して効率的に出力する方法は、簡単な作業ではありません。この背景に反して、この記事は、表面上では重要ではないように見えるかもしれないが、実際の用途、つまりLR44バッテリーでは非常に用途が広いものになる可能性のあるコ...01/1/1970で公開されています 1774
-
基礎を理解する:インダクタンス抵抗、および副次的
電気工学の複雑なダンスでは、基本的な要素のトリオが中心的な舞台、つまりインダクタンス、抵抗、静電容量です。それぞれが、電子回路の動的なリズムを決定するユニークな特性を備えています。ここでは、これらのコンポーネントの複雑さを解読し、広大な電気オーケストラ内でそれらの明確な役割と実用的な使用を明らかにするための旅に着手します。インダクタンス、その磁束魔法のwizardry;抵抗、電流の流れの不動の門番;電荷のア...01/1/1970で公開されています 1728
-

CR2430バッテリー包括的なガイド:仕様、アプリケーション、およびCR2032バッテリーとの比較
CR2430バッテリーとは何ですか?CR2430バッテリーの利点規範CR2430バッテリーアプリケーションCR2430相当CR2430対CR2032バッテリーCR2430サイズCR2430と同等物を購入するときに何を探すべきかデータシートPDFよくある質問 バッテリーは小さな電子機器の中心です。利用可能な多くのタイプの中で、コイン細胞は、計算機、リモートコントロール、および時計によく見られる重要な役割を果たします。サイズが小さいにもかかわらず、各コ...01/1/1970で公開されています 1676
-
RFとは何ですか?なぜそれを使用するのですか?
無線周波数(RF)テクノロジーは、最新のワイヤレス通信の重要な部分であり、物理的な接続なしで長距離にわたってデータ伝送を可能にします。この記事では、RFの基本を掘り下げ、電磁放射(EMR)がRF通信を可能にする方法を説明します。EMRの原則、RF信号の作成と制御、およびそれらの幅広い用途を探ります。この記事では、RFテクノロジーの歴史的なマイルストーン、関係する技術的課題、および信頼できるRFコミュニケーションを確...01/1/1970で公開されています 1670
-
トランジスタのHFEへの包括的なガイド
トランジスタは、最新の電子デバイスの重要なコンポーネントであり、信号増幅と制御を可能にします。この記事では、トランジスタのHFE値を選択する方法、HFEの検索方法、さまざまなタイプのトランジスタのゲインなど、HFEを取り巻く知識を掘り下げています。HFEの探索を通じて、トランジスタがどのように機能するかと電子回路での役割をより深く理解しています。 カタログ トランジスタのHFEとは何ですか? トランジスタのHFEを計...11/15/5600で公開されています 1632
ホットパーツ番号
-

M24256E-FMN6TP
STMicroelectronics
IC EEPROM 256KBIT I2C 1MHZ 8SO
LTM8047MPY#PBF
Analog Devices Inc.
DC DC CONVERTER 2.5-12V
7443320150
Würth Elektronik
FIXED IND 1.5UH 19.5A 3.5MOHM SM
URF2412P-6WR3
Mornsun America, LLC
DC DC CONVERTER 12V 6W
C1608X6S0G685M080AC
TDK Corporation
CAP CER 6.8UF 4V X6S 0603
XPC860ZP33C1
Motorola
RISC MICROPROCESSOR, 32 BIT, POW
MCIMX31LCVMN4C
NXP USA Inc.
IC MPU I.MX31 400MHZ 473MAPBGA
LP2985AIM5-4.0
Texas Instruments
IC REG LINEAR 4V 150MA SOT23-5
74LCX157MTC
onsemi
IC MULTIPLEXER 4 X 2:1 16TSSOP
NUF6001MUT2G
onsemi
FILTER RC(PI) 100 OHM/17PF SMD
S1GA-E3/5AT
Vishay General Semiconductor - Diodes Division
DIODE GEN PURP 400V 1A DO214AC
ACPL-790B-500E
Broadcom Limited
IC OPAMP ISOLATION 1 CIRC 8DIPGW
C2012C0G1H101J
TDK Corporation
CAP CER 100PF 50V C0G 0805
04025U1R0DAT2A
KYOCERA AVX
CAP CER 1PF 50V NP0 0402
NTCS0402E3104FHT
Vishay Beyschlag/Draloric/BC Components
THERM NTC 100KOHM 3950K 0402
ADSP-21569KBCZ8
Analog Devices Inc.
800 MHZ SHARC WITH DDR IN A BGA
SRR1210-150M
Bourns Inc.
FIXED IND 15UH 5.8A 32 MOHM SMD
SMF4L43A
Littelfuse Inc.
TVS DIODE 43VWM 69.4VC SOD123FL -

A3240EUA-T
Allegro MicroSystems
MAGNETIC SWITCH UNIPOLAR 3SIP
SN74LV4052APW
Texas Instruments
IC SWITCH SP4T X 2 75OHM 16TSSOP
STP315N10F7
STMicroelectronics
MOSFET N-CH 100V 180A TO220
PM5441A-FEI
Microchip Technology
DIGI 60G, PB FREE BUMPS
ILC7081AIM5ADJX
Fairchild Semiconductor
IC REG LINEAR ADJ LDO REGULATOR
MC68EN360CAI25L
Freescale Semiconductor
RISC MICROPROCESSOR, CMOS, PQFP
MINISMDC110F/24-2
Littelfuse Inc.
PTC RESET FUSE 24V 1.1A 1812
IXFH86N30T
IXYS
MOSFET N-CH 300V 86A TO247AD
RT1206DRD0710RL
YAGEO
RES SMD 10 OHM 0.5% 1/4W 1206
AMIS42770ICAW1G
onsemi
IC TRANSCEIVER HALF 2/2 20SOIC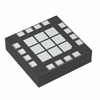
SKY66397-12
Skyworks Solutions Inc.
IC AMP LTE 2.3GHZ-2.7GHZ 16MCM
IDCP2218ER220M
Vishay Dale
FIXED IND 22UH 1.11A 180MOHM SMD
GRM1886S1H100JZ01D
Murata Electronics
CAP CER 10PF 50V S2H 0603
X9C103SIZ
Renesas Electronics America Inc
IC DGTL POT 10KOHM 100TAP 8SOIC
BAV70Q-13-F
Diodes Incorporated
SWITCHING DIODE SOT23 T&R 10K
LM2670T-5.0
Texas Instruments
IC REG BUCK 5V 3A TO220-7
AH1804-FA-7
Diodes Incorporated
MAG SWITCH OMNIPOLAR DFN1216-4
ADRF5045BCCZN
Analog Devices Inc.
IC RF SWITCH SP4T 30GHZ 24LGA -

NLSX3012MUTAG
onsemi
IC TRANSLTR BIDIRECTIONAL 8UDFN
L9777B
STMicroelectronics
IC REG LIN POS ADJ 600MA PWRSSO
1N5711
NTE Electronics, Inc
D-SCHOTTKY 70V
SN74AS138DR
Texas Instruments
IC DECODER/DEMUX 1X3:8 16SOIC
TS836-4ID
STMicroelectronics
IC SUPERVISOR 1 CHANNEL 8SO
AD5200BRM10-REEL7
Analog Devices Inc.
IC POT DGTL 10K 256POS 10MSOP
IRFIZ34GPBF
Vishay Siliconix
MOSFET N-CH 60V 20A TO220-3
MB90F334APMC-GE1
Infineon Technologies
IC ANALOG
DAC7545JU
Texas Instruments
IC 12-BIT CMOS D/A CONV 20-SOIC
CL10A106MP8NNNC
Samsung Electro-Mechanics
CAP CER 10UF 10V X5R 0603
VLF302512MT-4R7M
TDK Corporation
FIXED IND 4.7UH 1.42A 136MOHM SM
SMCJ220A
Littelfuse Inc.
TVS DIODE 220VWM 356VC DO214AB
GD25Q256DYIGR
GigaDevice Semiconductor (HK) Limited
IC FLASH 256MBIT SPI/QUAD 8WSON
TPS51020DBT
Texas Instruments
IC REG CTRLR DDR 2OUT 30TSSOP
MTA12020NLT
Pulse Electronics
TRANSFORMER
CC0402CRNPO9BN2R4
YAGEO
CAP CER 2.4PF 50V C0G/NPO 0402
CL10F823ZB8NNNC
Samsung Electro-Mechanics
CAP CER 0.082UF 50V Y5V 0603
SMAJ16
Taiwan Semiconductor Corporation
400W, 19.8V, 10%, UNIDIRECTIONAL