L298Nモータードライバー:機能、回路図、アプリケーション
カタログ
L298Nの紹介
L298N L298の垂直パッケージバージョンです。これは、高電圧と高電流を受け入れることができるデュアルチャネルフルブリッジモータードライバーチップです。その動作電圧は46Vに達する可能性があり、その最大出力電流は4aです。さらに、L298Nには2つの有効な制御端子もあります。これらの制御端子は、入力信号によって干渉されることなく、オンボードジャンパーをプラグして解除することにより、回路の作業モードを動的に調整することができます。L298Nには、内部ロジック回路部分が低電圧で動作できるようにするロジック電源入力が装備されています。同時に、5Vのロジック電圧を外部から出力することもできます。12Vを超える駆動電圧を使用する場合、電圧安定化チップの損傷を回避するために、独立した電源に外部5Vインターフェイスを使用することを強くお勧めします。
L298Nは、メインコントロールチップ上のI/O入力端子を制御し、電源を介して出力電圧を直接調整して、モーターの前方、逆、停止を実現します。通常、L298Nは、リレー(4方向)、ソレノイド、ソレノイドバルブ、2つのDCモーター、1つのステッパーモーター(2相または4相)を直接駆動できます。
代替品と同等物:
•E-L298N
• L298hn
•LM18298T
L298Nの機能的特徴
ロジック入力互換性:L298Nのロジック入力は、TTL、CMOS、およびその他のロジックレベルと互換性があります。
過熱保護:L298Nには、過熱保護機能があります。チップ温度が高すぎると、出力が自動的に切断されます。
組み込みのフリー極性ダイオード:L298Nには、DCモーターのブレーキングに使用できるフリー極性ダイオードが組み込まれています。
大電流出力:L298Nは大きな出力電流を提供でき、大規模な駆動電流を必要とする一部のアプリケーションに適しています。
二重Hブリッジ構造:L298Nは、2つのDCモーターまたはステッパーモーターのステアリングと速度を制御できる二重Hブリッジ構造を統合します。
L298N回路図
L298Nの回路図は次のとおりです。
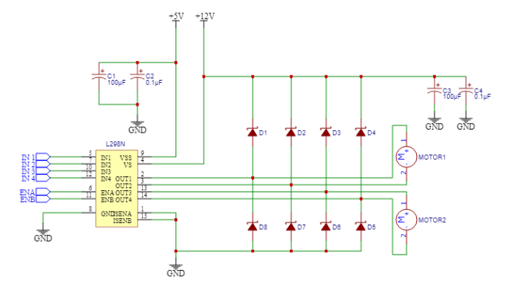
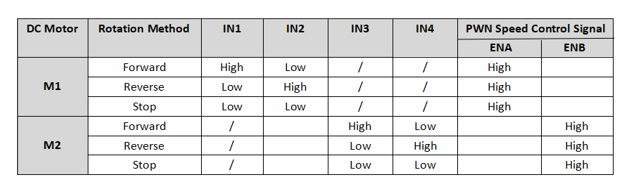
out1、out2、out3、out4はmotor1、motor2に接続されています。IN1、IN2、IN3、IN4マイクロコントローラーからピンが制御レベルにアクセスし、モーターを前方と逆に制御します。ENAは、モーターの速度を制御するために、有効端子の制御に接続されています。L298N制御ロジック関係図は次のとおりです。
モーター速度の調節に関して、PWM速度規制法を採用しました。原則は、1つのサイクルでスイッチングチューブの伝導時間tを制御することにより、速度調節を実現することにあります。完全なサイクル中のモーター全体の平均電圧uは、u = vcc×(t/t)= a×vccとして表すことができます。ここで、a = t/tはデューティサイクルとして知られており、VCCは供給電圧を表します。モーターの速度はモーター全体の電圧に比例しますが、モーター全体の電圧は制御波形のデューティサイクルに比例します。したがって、モーターの速度とデューティサイクルの間には比例的な関係があります。デューティサイクルが高いほど、モーターの速度が速くなります。
L298Nの制御方法
L298Nを使用する場合、モーターの順方向と逆回転と速度を制御するために、IN1、IN2、IN3、およびIN4に制御信号を入力する必要があります。ここにいくつかの制御方法があります:
PWM制御モード
PWMモードは、モーターの速度を効果的に制御できます。PWMモードを使用する場合、2つのピンEN1とEN2を使用して、モーターの速度を調整する必要があります。具体的には、EN1およびEN2ピンが高レベルにある場合、モーターは正常に動作します。それらが低レベルの場合、モーターは回転を停止します。
一元配置制御モード
IN1、IN2、IN3、およびIN4が同時に高レベルになると、モーターは前方に回転します。2つの入力ポートが高レベルで、他の2つの入力ポートが低い場合、モーターは逆回転します。
双方向制御モード
双方向制御モードを使用する場合、IN1とIN2はモーター1の制御を担当し、IN3とIN4はモーター2の制御に責任があります。特に、IN1が高レベルで、IN2が低い場合、モーター1は前方に回転します。逆に、IN1が低レベルで、IN2が高レベルの場合、モーター1は逆回転します。同様に、IN3とIN4の制御ロジックは、モーター2の順方向および逆回転制御にも適用できます。
L298Nのピン図と関数
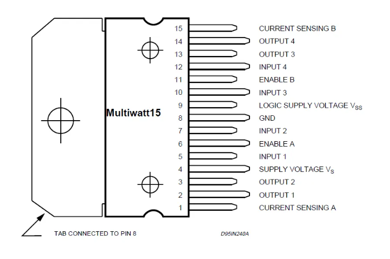
パワーピン
VS:電源電圧入力(最大46V)
GND:グランドピン
ロジックコントロールピン
IN1、IN2:モーターの回転方向を制御するために使用
IN3、IN4:モーター2の回転方向を制御するために使用
モーターコントロールピン:
out1、out2:モーターの方向を制御するために使用
out3、out4:モーターの方向を制御するために使用
ENA:モーターの速度を制御するために使用されるピンを有効にします1
ENB:モーターの速度を制御するために使用されるピンを有効にします2
L298Nの使用方法は?
電源を接続します。L298Nドライバーモジュールの電源は、12V〜35Vの範囲に保持する必要があります。実際のアプリケーションでは、電源の安定性を確保するために、電源をフィルタリングする必要がある場合があります。
モーターを接続します。2つのモーターをドライバーを介してL298Nの出力ピンに接続すると、制御レベルはL298Nを介してモーターに直接入力されます。
コントロールL298N:コントロールポート(有効、コントロールピン)を使用して、L298Nを制御します。値を割り当てるときに、有効なポートとコントロールピンのステータスを設定する必要があります。これらのステータスは、L298N出力のレベルステータスを決定します。これらの状態を変更することにより、モーターの前後の回転と速度を効果的に制御できます。
PWMを使用してモーターの速度を調節する方法は?
PWMを使用してモーターの速度を調節する場合は、2つの配線方法があります。
配線方法1(推奨):
チャネルイネーブルと5Vの間のジャンパーキャップを削除し、enableピンをArduinoのPWMピンに接続し、ピン1と2をArduinoの2つの通常のピンに接続します。このようにして、PWMピンを介してチャネルのスイッチを制御して、モーターの速度を調整できます。ピン1および2のレベルステータスを制御することにより、モーターの回転方向を制御できます。この方法では、チャネルごとに1つのPWMピンを使用する必要がありますが、2つの通常のピンを占有します。したがって、実際のアプリケーションでは、Arduinoで利用可能なピンの数に基づいて、複数の配線方法を比較検討し、選択する必要があります。
配線方法2(推奨されません):
チャネルイネーブルと5Vの間のジャンパーを削除することはないため、チャネルは継続的に開いたままになります。次に、ピン1と2をそれぞれArduinoの2つのPWMインターフェイスに接続しました。これら2つのピンにそれぞれ対応する出力をそれぞれ制御することにより、モーターの回転方向と速度を制御できます。明らかに、各チャネルには制御するために2つのPWMピンが必要なため、この配線方法はより多くのPWMピンを占有します。ただし、この方法は一般的なピンを占有しません。したがって、PWM PINリソースがタイトな場合、この配線スキームを使用することはお勧めしません。
L298Nはどこで使用されますか?
電気自動車:L298Nは、電気自転車、スクーターなどの電気自動車のドライブモーターを制御するために使用できます。たとえば、自転車など、モーターの回転速度と方向を正確に制御することにより、L298Nは加速、減速、および減速を達成できます。電気自転車の安定した運転。ライダーは、ハンドルまたはボタンを操作することにより、L298Nに命令を送信でき、それによりモーターの出力を制御して、ライダーの希望に応じて自転車のドライブを作成できます。
自動産業機器:産業自動化の分野では、L298Nを使用して、コンベアベルト、ロボットアーム、工業用ロボットなどのさまざまな産業機器のモーターを制御できます。たとえば、ロボットアームでは、L298Nは正確に制御します。モーターの回転角度と速度により、ロボットアームが所定の軌跡に従って移動し、高精度の動作を実現できます。これにより、生産効率が向上するだけでなく、運用上のエラーによる生産量の損失も減少します。
ロボットテクノロジー:L298Nは、ロボットプロジェクトでよく使用され、ドライブモーターを制御してロボットの動きと作用を実現します。産業用ロボットは、多くの場合、重荷、高精度作業を行う必要があり、ドライブモーターに非常に高い要件を持っています。L298Nは、優れた運転能力と安定性を備えた産業用ロボットに強力な電力サポートを提供します。L298Nは、ハンドリング、アセンブリ、または検査であれ、産業用ロボットが正確かつ効率的にタスクを完了することを保証できます。
スマートホーム:スマートホームシステムでは、L298Nを使用して、ブラインド、カーテン、ドア、その他の機器のモーターを制御して自動制御を実現できます。センサーと組み合わせることにより、照明、温度、その他の条件に応じて自動車用品を自動的に調整できます。
ソーラー追跡システム:ソーラーシステムでは、L298Nを使用してソーラーパネルの傾斜角を制御してソーラー追跡システムを実装できます。L298Nの制御により、ソーラー追跡システムは、リアルタイムで太陽の位置の変化を感知し、それに応じてソーラーパネルの傾斜角を調整できます。この動的調整プロセスにより、ソーラーパネルは常に太陽に対して最適な角度を維持し、それによりソーラーパネルのエネルギー収集効率を改善することが保証されます。
よくある質問[FAQ]
1. L298Nは速度を制御できますか?
L298Nは、2つのDCモーターの速度と方向制御を同時に可能にするデュアルHブリッジモータードライバーです。
2.なぜ私のL298Nが機能していないのですか?
L298の正しい動作のために4.5Vを超える必要があります。2. L298全体でおそらく2.5Vを失います。たぶん、モーターを走らせるのに十分な電圧が残っていないでしょう。
3. L298Nとは何ですか?
L298Nモータードライバーは、Hブリッジを使用してモーターの方向とPWMを簡単に制御して速度を制御するコントローラーです。このモジュールを使用すると、それぞれ最大2Aの2つのモーターを両方向に独立して管理できます。供給範囲は、ほとんどのDCモータープロジェクトで十分であり、5V〜35Vの間で異なる場合があります。
4. 4つのモーターをL298Nに接続できますか?
答えはイエスであり、No。それはL298Nモータードライバーの使用方法によって異なります。L298Nはもともと、2つのDCモーターまたは1つのステッピングモーターを制御するために設計されています。ただし、各モーターが後方に回転したくない場合は、L298Nドライバーの両側を使用して2つのDCモーターと合計4つのモーターを制御できます。