ステッパーモータープロジェクトにPIC16F877Aを使用するガイド
PIC16F877Aマイクロコントローラーは、多くの電子プロジェクトで広く使用されています。これは、機能のバランスと使いやすさを提供するためです。このガイドでは、PIC16F877Aを詳しく見て、ピンアウトやCADモデルからステッパーモーターの制御に使用するまで、すべてをカバーします。シンプルなデバイスまたは複雑な自動化プロジェクトを構築するかどうかにかかわらず、このマイクロコントローラーを使用してモーターを接続および制御する方法を理解すると、最良の結果が得られます。
カタログ

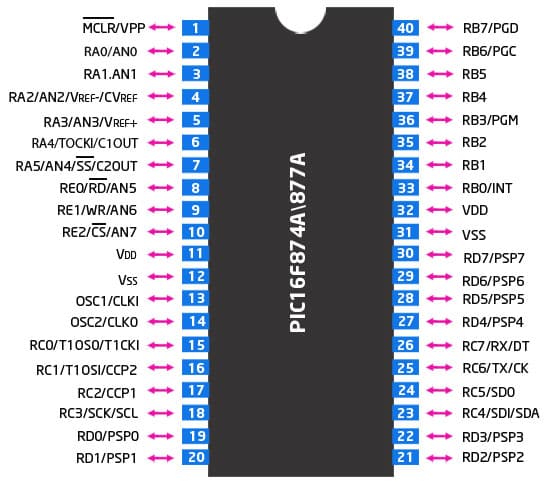
PIC16F877A PIN構成
PIC16F877AのCADモデル
PIC16F877A図シンボル
PIC16F877A PCBフットプリント

3Dモデル
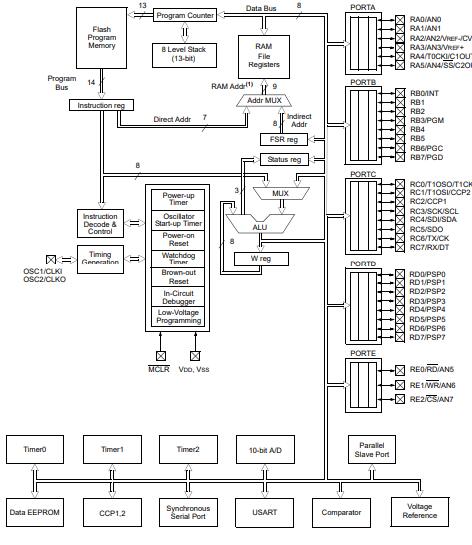
PIC16F877A内部構造
詳細な技術仕様
| タイプ | パラメーター |
| 工場のリードタイム | 7週間 |
| マウント | 穴を通して |
| 取り付けタイプ | 穴を通して |
| パッケージ /ケース | 40-dip(0.600、15.24mm) |
| ピンの数 | 40 |
| データコンバーター | A/D 8x10B |
| I/OSの数 | 33 |
| ウォッチドッグタイマー | はい |
| 動作温度 | -40°C〜85°C Ta |
| パッケージング | チューブ |
| シリーズ | 写真® 16F |
| 公開 | 1997年 |
| JESD-609コード | E3 |
| pbfreeコード | はい |
| パーツステータス | アクティブ |
| 水分感度レベル(MSL) | 1(無制限) |
| 終端の数 | 40 |
| ECCNコード | ear99 |
| 端子仕上げ | マットティン(SN) - アニール |
| 追加機能 | 最小供給4Vで動作します |
| 端子位置 | デュアル |
| 供給電圧 | 5V |
| 頻度 | 20MHz |
| ベースパーツ番号 | PIC16F877A |
| ピンカウント | 40 |
| 電源電圧マックス(VSUP) | 5.5V |
| 電源 | 5V |
| 供給電圧-min(vsup) | 4.5V |
| インタフェース | I2C、SPI、SSP、UART、USART |
| メモリサイズ | 14kb |
| オシレータータイプ | 外部の |
| 公称供給電流 | 1.6ma |
| ラムサイズ | 368 x 8 |
| 電圧 - 供給(VCC/VDD) | 4V〜5.5V |
| UPS/UCS/末梢ICタイプ | マイクロコントローラー、RISC |
| コアプロセッサ | 写真 |
| 周辺機器 | ブラウンアウト検出/リセット、POR、PWM、WDT |
| プログラムメモリタイプ | フラッシュ |
| コアサイズ | 8ビット |
| プログラムメモリサイズ | 14kb(8k x 14) |
| 接続性 | i2c、spi、uart/usart |
| ビットサイズ | 8 |
| アクセス時間 | 20 µs |
| ADCがあります | はい |
| DMAチャネル | いいえ |
| データバス幅 | 8b |
| タイマー/カウンターの数 | 3 |
| アドレスバス幅 | 8b |
| 密度 | 112 kb |
| EEPROMサイズ | 256 x 8 |
| CPUファミリー | 写真 |
| ADCチャネルの数 | 8 |
| PWMチャネルの数 | 2 |
| I2Cチャネルの数 | 1 |
| 身長 | 4.06mm |
| 長さ | 52.45mm |
| 幅 | 14.22mm |
| SVHCに到達します | SVHCなし |
| 放射線硬化 | いいえ |
| ROHSステータス | ROHS3準拠 |
| 鉛フリー | 鉛フリー |
ステッピングモーターの理解
ステッパーモーターは、従来のモーターのような連続運動ではなく、特定のステップで移動する電気モーターの一種です。これらの段階的な動きは、程度で測定されます。これは、アプリケーションによって異なる場合があります。
ステッピングモーターは、ウェーブドライブ、フルドライブ、ハーフドライブのさまざまなモードで動作できます。各モードは、モーターフェーズがどのようにエネルギーを与えられているかを制御し、そのパフォーマンスに影響を与え、さまざまな用途に適しています。
ウェーブドライブモードでは、モーターの1つのフェーズのみが一度に駆動されます。この単純な制御モードは、最小限の開始電流が必要な基本的な自動化タスクなど、トルクよりも電力効率が優先される状況に役立ちます。
フルドライブモードは、同時に2つのフェーズを駆動します。これにより、2つのコイルが連携するため、トルク出力が高くなり、ロボット工学やCNC機械などの精度と強度が必要なアプリケーションに最適です。
ハーフドライブモードは、1つのフェーズと2つのフェーズを交互にエネルギーすることにより、波とフルドライブの両方の機能を組み合わせます。このアプローチは、より少ないステップサイズを提供し、モーターの解像度を効果的に2倍にします。ハーフドライブは、滑らかな動きと正確なポジショニングが不可欠な3D印刷や細かい計装などのアプリケーションに最適です。
特定の使用のためにステッピングモーターを選択するときは、動作環境を検討してください。高精度のタスクの場合、スムーズな遷移と振動の減少を確保するために、ハーフドライブモードをお勧めします。エネルギー節約に焦点を当てたプロジェクトの場合、ウェーブドライブモードがより適切かもしれません。
適切なモードを選択するには、トルク、速度、システムの複雑さなどのバランスをとる要因が必要です。正しいモードを選択すると、モーターのパフォーマンスとシステムの全体的な効率に大きな影響を与える可能性があります。
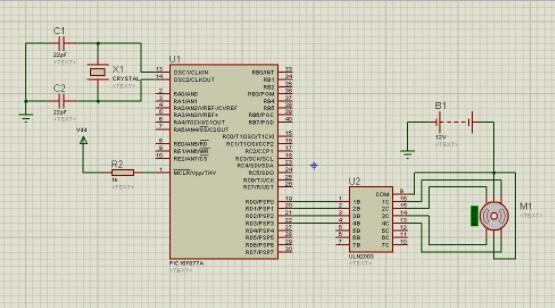
ステッパーモーターをPIC16F877Aと接続します
ステッパーモーターをaと接続するには PIC16F877A マイクロコントローラー、ULN2003トランジスタアレイを使用できます。高トルクモーター用に設計されたこの統合回路には、7つのダーリントンペアが含まれています。マイクロコントローラーの下部PORTDビットは、ULN2003の入力ピン(1B、2B、3B、4B)にリンクされ、その出力ピン(1C、2C、3C、4C)がステッパーモーターのピンに接続します。モーターとULN2003のCOMピンの一般的なピンは、12V電源に接続されています。
ステッピングモーターは、一般的に正確なモーション制御を必要とするアプリケーションに使用されます。デジタルパルスを機械的回転に変換し、CNCマシンや3Dプリンターなどのデバイスに最適であり、位置と速度を慎重に規制する必要があります。
ULN2003は、高電流を処理する能力とマイクロコントローラーとの簡単なインターフェースにより、ステッパーモーターの制御に重要な役割を果たします。PIC16F877Aに接続すると、ステッパーモーターを制御するために下部PORTDビットが使用されます。この構成は、正確なステップ制御を提供し、正確な動きと位置付けを確保します。
モーター制御セットアップでULN2003を使用することは、実際のアプリケーションでは非常に信頼性が高くなります。逃したステップやポジショニングの誤った問題などの問題を最小限に抑え、全体的なパフォーマンスを改善するのに役立ちます。使用法に基づいた定期的なメンテナンスとキャリブレーションは、モーター機能をさらに最適化し、長期的な安定性と正確な動作を確保することができます。
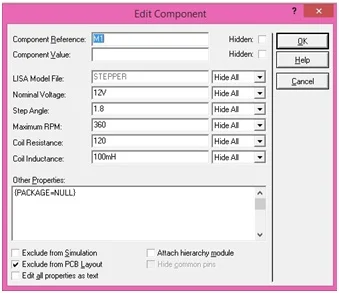
ステッピングモーターの速度の調整
Stepperモーターの速度は、Proteusシミュレーションソフトウェアを使用して正確に変更できます。「編集プロパティ」を介してモーターの設定にアクセスすることにより、ステップ数やステップ角などのパラメーターを調整できます。たとえば、200段階のモーターが完全な回転(360°)を200ステップに分割し、各ステップを1.8°にします。プロテウスのこれらの設定を変更すると、シミュレーション中に動的に反映されます。
実際には、ステッピングモーターは、CNC機械やロボット工学など、運動の正確な制御が重要である産業でしばしば採用されています。ステップ角度とステップ数を調整すると、特定のタスクに必要な正確な動きを実現するために、モーターを微調整します。
ステッピングモーターパラメーターの変更は、トルクや解像度などのパフォーマンス特性に影響します。たとえば、ステップ数を増やすと、一般に解像度が向上しますが、トルクと応答時間に影響を与える可能性があります。シミュレーションを通じてこれらのトレードオフを理解することは、情報に基づいた決定を下すのに役立ちます。
微妙な視点では、反復調整が実用的な試行が続くと、より堅牢なエンジン設計につながることが明らかになりました。デジタルシミュレーションが実際の結果を密接に反映することを保証することが重要です。ステッパーモーターの構成のニュアンスは、実際に理論的正確さと実用的な実現可能性のバランスをとることにあります。
PIC16F877Aを使用したステッピングモーターのプログラミング
このセクションでは、PIC16F877Aマイクロコントローラーを使用してステッパーモーターをプログラムする方法について説明し、さまざまな運転モードを説明し、効果的な実装のための実用的なガイダンスを提供します。
フルドライブモードを使用してステッパーモーターコントロールを実証するための基本的な例コードを次に示します。
void main()
{
trisd = 0b00000000;// PORTDを出力として設定します
portd = 0b11111111;// portdを初期化します
する
{
portd = 0b00000011;// 2つのフェーズを同時にエネルギー化します
delay_ms(500);// 0.5秒の遅延
portd = 0b00000110;
delay_ms(500);
portd = 0b00001100;
delay_ms(500);
portd = 0b00001001;
delay_ms(500);
} while(1);//無期限にループ
}
このコードでは、PIC16F877AのPORTDは、ULN2003ドライバーを介してステッパーモーターを制御する出力ポートとして構成されています。一連のコマンドは、一度にステッピングモーターの2つのフェーズをエネルギーにします。これは、フルドライブモードの特徴です。このモードは、ローターを最大トルクで固定位置に保持しますが、通常、より多くの電力を消費します。
フルドライブモードは、ステッパーモーターを制御する唯一の方法ではありません。ウェーブドライブモードとハーフドライブモードは、特定の要件に基づいて代替案を提供します。Wave Driveは一度に1つのフェーズのみをエネルギーします。これにより、消費電力が減少しますが、トルクが低下します。ハーフドライブは1つと2つのフェーズを交互に行い、より高い解像度とより滑らかな動きを提供します。
Stepperモーターをプログラミングするときは、正確なポジショニング、電力効率、最大トルクなど、ニーズに最適な運転モードを選択してください。
ステッパーモーターの実用的なアプリケーション
Stepper Motorsは、正確な制御と信頼性の高いパフォーマンスを提供する能力のため、多くの業界で広く使用されています。それらの汎用性により、車や家電製品から産業機械や医療機器まで、あらゆるものに適しています。
自動車の世界では、ステッパーモーターズは、スロットル、ヘッドライト、エアコンなどのシステムを制御する上で重要な役割を果たします。これらのコンポーネントを微調整し、車両がスムーズかつ効率的に実行されるようにします。一方、プリンターやコピー機などのオフィス機器では、Stepper Motorsは紙の給餌やインクの配置などのタスクを処理します。この精度は、時間の経過とともに一貫した印刷品質とスムーズな動作を保証します。
自宅では、洗濯機や食器洗い機などの家電製品はステッパーモーターに依存して水の流れとドラムの回転を制御し、すべてがシームレスに機能するようにします。産業環境では、ステッパーモーターはCNCマシンとロボットアームの操作に不可欠であり、高精度の製造に必要な正確な動きを提供します。
また、セキュリティシステムは、ステッパーモーターズの信頼できる動きの恩恵を受けています。監視カメラや自動化されたロックなどのデバイスでは、ステッピングモーターが滑らかで正確なポジショニングを可能にします。これは、効果的な監視とセキュリティに不可欠です。ヘルスケアでは、ステッピングモーターは注入ポンプやイメージング機器などの医療機器で使用され、安全で正確な操作に必要な正確な制御を提供します。
テクノロジーが進化し続けるにつれて、ステッパーモーターズは、ロボット工学や自動運転車などの新興分野でさらに多くのアプリケーションを見つけることが期待されています。彼らの継続的な発展は、おそらくより正確さと効率性を高め、さまざまな業界での役割を拡大するでしょう。
同等のマイクロコントローラー部品
| 部品番号 | pic16f877a-i/p | pic16f77-i/p | pic16f74-i/p | pic16f777-i/p |
| メーカー | マイクロチップテクノロジー | マイクロチップテクノロジー | マイクロチップテクノロジー | マイクロチップテクノロジー |
| パッケージ /ケース | 40-dip(0.600、15.24mm) | 40-dip(0.600、15.24mm) | 40-dip(0.600、15.24mm) | 40-dip(0.600、15.24mm) |
| ピンの数 | 40 | 40 | 40 | 40 |
| データバス幅 | 8 b | 8 b | 8 b | 8 b |
| I/Oの数 | 33 | 33 | 33 | 36 |
| インタフェース | I2C、SPI、SSP、UART、USART | I2C、SPI、SSP、UART、USART | I2C、SPI、SSP、UART、USART | i2c、spi、uart、usart |
| メモリサイズ | 14 kb | 7 kb | 14 kb | 14 kb |
| 供給電圧 | 5 v | 5 v | 5 v | 5 v |
| 周辺機器 | ブラウンアウト検出/リセット、POR、PWM、WDT | ブラウンアウト検出/リセット、POR、PWM、WDT | ブラウンアウト検出/リセット、POR、PWM、WDT | ブラウンアウト検出/リセット、POR、PWM、WDT |
| 比較を表示します | pic16f877a-i/p vs pic16f77-i/p | pic16f877a-i/p vs pic16f77-i/p | pic16f877a-i/p vs pic16f74-i/p | pic16f877a-i/p vs pic16f777-i/p |
よくある質問[FAQ]
1.ステッピングモーターは、機械的な動きを生成するために何を使用しますか?
ステッピングモーターは、電気パルスを使用して機械的な動きを生成します。
2。ステッパーモーターは何をしますか?
ステッピングモーターは個別のステップで移動します。
3.ステッパーモーターはどのように測定されますか?
ステッピングモーターは程度で測定されます。
4.ステッピングモーターはいくつのステップを撮りますか?
ステッピングモーターは、一度に1ステップずつ移動します。
5.ステッパーモーターにはいくつの励起モードがありますか?
ステッピングモーターには3つの励起モードがあります。
6.ステッピングモーターを接続する最も簡単な方法は何ですか?
最も簡単な方法は、PIC16F877Aマイクロコントローラーに接続することです。
7. ULN2003の入力ピンの数は、マイクロコントローラーのPORTDの最も低い重要なビットに接続されていますか?
4つの入力ピンが、マイクロコントローラーのPORTDの最も低いビットに接続されています
関連情報
ALLELCO LIMITED
もっと見る
クイックお問い合わせ
お問い合わせを送ってください、すぐに返信します。
なぜプロジェクトにAdesto RM25C64DS-LTAI-Bメモリチップを選択するのですか?
10/10/2024で公開されています
PC817 OptoCoupler:機能と最新のアプリケーション
10/10/2024で公開されています
ホットポスト
-
回路のGNDとは何ですか?
01/1/1970で公開されています 2836
-

RJ-45コネクタガイド:RJ-45コネクタカラーコード、配線スキーム、R-J45アプリケーション、RJ-45データシート
01/1/1970で公開されています 2407
-

ファイバーコネクタタイプ:SC対LCおよびLC対MTP
01/1/1970で公開されています 2017
-
エレクトロニクスVCC、VDD、VEE、VSS、およびGNDの電源電圧の理解
11/5/0400で公開されています 1763
-

DB9とRS232の比較
01/1/1970で公開されています 1724
-

LR44バッテリーとは何ですか?
そのユビキタスな力は、些細なガジェットから生命を脅かす医療機器まで、私たちの日常生活のあらゆる側面に静かに浸透し、静かな役割を果たします。しかし、このエネルギーを本当に把握し、特にそれを保存して効率的に出力する方法は、簡単な作業ではありません。この背景に反して、この記事は、表面上では重要ではないように見えるかもしれないが、実際の用途、つまりLR44バッテリーでは非常に用途が広いものになる可能性のあるコ...01/1/1970で公開されています 1677
-
基礎を理解する:インダクタンス抵抗、および副次的
電気工学の複雑なダンスでは、基本的な要素のトリオが中心的な舞台、つまりインダクタンス、抵抗、静電容量です。それぞれが、電子回路の動的なリズムを決定するユニークな特性を備えています。ここでは、これらのコンポーネントの複雑さを解読し、広大な電気オーケストラ内でそれらの明確な役割と実用的な使用を明らかにするための旅に着手します。インダクタンス、その磁束魔法のwizardry;抵抗、電流の流れの不動の門番;電荷のア...01/1/1970で公開されています 1617
-

CR2430バッテリー包括的なガイド:仕様、アプリケーション、およびCR2032バッテリーとの比較
CR2430バッテリーとは何ですか?CR2430バッテリーの利点規範CR2430バッテリーアプリケーションCR2430相当CR2430対CR2032バッテリーCR2430サイズCR2430と同等物を購入するときに何を探すべきかデータシートPDFよくある質問 バッテリーは小さな電子機器の中心です。利用可能な多くのタイプの中で、コイン細胞は、計算機、リモートコントロール、および時計によく見られる重要な役割を果たします。サイズが小さいにもかかわらず、各コ...01/1/1970で公開されています 1495
-

CR2450対CR2032:代わりにバッテリーを使用できますか?
リチウムマンガンバッテリーには、他のリチウム電池といくつかの類似点があります。高エネルギー密度と長いサービス寿命は、彼らが共通している特性です。この種のバッテリーは、独自の安全性のために多くの消費者の信頼と好意を獲得しています。高価なハイテクガジェット?私たちの家に小さな電化製品?周りを見回すと、どこにでも表示されます。これらの多くのリチウムマンガンのバッテリーの中で、CR2450バッテリーとCR2032バッ...01/1/1970で公開されています 1471
-
RFとは何ですか?なぜそれを使用するのですか?
無線周波数(RF)テクノロジーは、最新のワイヤレス通信の重要な部分であり、物理的な接続なしで長距離にわたってデータ伝送を可能にします。この記事では、RFの基本を掘り下げ、電磁放射(EMR)がRF通信を可能にする方法を説明します。EMRの原則、RF信号の作成と制御、およびそれらの幅広い用途を探ります。この記事では、RFテクノロジーの歴史的なマイルストーン、関係する技術的課題、および信頼できるRFコミュニケーションを確...01/1/1970で公開されています 1449
ホットパーツ番号
-

CL31B103KDCNNNC
Samsung Electro-Mechanics
CAP CER 10000PF 200V X7R 1206
1N2138A
GeneSiC Semiconductor
DIODE GEN PURP 600V 60A DO5
EPM9560RC304-15
Intel
IC CPLD 560MC 15NS 304RQFP
AFBR-59R5ALZ
Broadcom Limited
TXRX SFF 4/2/1GBD 2X7 DIP
MIC94052YC6-TR
Microchip Technology
MOSFET P-CH 6V 2A SC70-6
ISL62882HRTZ-T
Renesas Electronics America Inc
IC REG CTRL IMVP-6.5 1OUT 40TQFN
JMK325BJ226MM-T
Taiyo Yuden
CAP CER 22UF 6.3V X5R 1210
EPM7128AETC100-7N
Intel
IC CPLD 128MC 7.5NS 100TQFP
TLC080CD
Texas Instruments
IC OPAMP GP 1 CIRCUIT 8SOIC
AD5328ARUZ
Analog Devices Inc.
IC DAC 12BIT V-OUT 16TSSOP
STPS0520Z
STMicroelectronics
DIODE SCHOTTKY 20V 500MA SOD123
BAV70WT1
onsemi
DIODE SWITCH DUAL CC 70V SOT323
MAX4628EUT+T
Analog Devices Inc./Maxim Integrated
IC SWITCH SPST SOT23-6
FCH125N60E
onsemi
MOSFET N-CH 600V 29A TO247-3
MC68030FE25C
NXP USA Inc.
IC MPU M680X0 25MHZ 132CQFP
4300-003
Tusonix a Subsidiary of CTS Electronic Components
CAP FEEDTHRU 100V AXIAL
TAS5424TDKDQ1
Texas Instruments
IC AMP CLASS D QUAD 116W 44HSSOP
06031A560KAT2A
KYOCERA AVX
CAP CER 56PF 100V NP0 0603 -
06035A1R6CAT2A
KYOCERA AVX
CAP CER 1.6PF 50V NP0 0603
NCP1217AP100G
onsemi
IC OFFLINE SWITCH FLYBACK 7DIP
ALT80800KLPATR
Allegro MicroSystems
IC LED DRV RGLTR PWM 2A 16ETSSOP
ADS2807Y/250
Texas Instruments
IC ADC 12BIT PIPELINED 64HTQFP
MKE14Z64VLD4
NXP USA Inc.
IC MCU 32BIT 64KB FLASH 44LQFP
ISL60002CIH312Z-TK
Renesas Electronics America Inc
IC VREF SERIES 0.2% SOT23-3
1N3342B
Microchip Technology
DIODE ZENER 110V 50W DO5
IXTP100N04T2
IXYS
MOSFET N-CH 40V 100A TO220AB
ADC102S021CIMMX
Texas Instruments
IC ADC 10BIT SAR 8VSSOP
RLC16K1R00FTP
Kamaya Inc.
RES 1 OHM 1/4W 1% 0603
CD74AC74M96
Texas Instruments
IC FF D-TYPE DUAL 1BIT 14SOIC
HEF4081BT,653
NXP USA Inc.
IC GATE AND 4CH 2-INP 14-SO
M2S005-VFG256
Microchip Technology
IC SOC CORTEX-M3 166MHZ 256BGA
PIC24FJ128GC006-I/PT
Microchip Technology
IC MCU 16BIT 128KB FLASH 64TQFP
DFLZ13-7
Diodes Incorporated
DIODE ZENER 13V 1W POWERDI123
RC2010JK-07750RL
YAGEO
RES 750 OHM 5% 3/4W 2010
APT75GP120JDQ3
Microchip Technology
IGBT MOD 1200V 128A 543W ISOTOP
TLC5941RHBR
Texas Instruments
IC LED DRIVER LINEAR 80MA 32VQFN -

STM32L151CBU6A
STMicroelectronics
IC MCU 32BIT 128KB FLSH 48UFQFPN
CSD13202Q2
Texas Instruments
MOSFET N-CH 12V 22A 6WSON
M48T35-70PC1
STMicroelectronics
IC RTC CLK/CALENDAR PAR 28DIP
RT0603BRE0744R2L
YAGEO
RES SMD 44.2 OHM 0.1% 1/10W 0603
TMK316AB7106KLHT
Taiyo Yuden
CAP CER 10UF 25V X7R 1206
AP431AQL-7
Diodes Incorporated
IC VREF SHUNT PREC ADJ SOT-25
1N4004G
onsemi
DIODE GEN PURP 400V 1A AXIAL
PS22A76
Powerex Inc.
MOD IPM 1200V 25A LARGE DIP
C3216X7R2A683M160AA
TDK Corporation
CAP CER 0.068UF 100V X7R 1206
MC33074PG
onsemi
IC OPAMP JFET 4 CIRCUIT 14DIP
5SGXEA7N2F45C1N
Intel
IC FPGA 840 I/O 1932FBGA
IXFH150N25X3
IXYS
MOSFET N-CH 250V 150A TO247
OPA830IDR
Texas Instruments
IC VOLTAGE FEEDBACK 1 CIRC 8SOIC
SMM02040C1800FB300
Vishay Beyschlag/Draloric/BC Components
RES 180 OHM 1% 1/4W MELF 0204
VI-B1L-EV
Vicor Corporation
DC DC CONVERTER 28V 150W
EPM7256BTC144-7N
Intel
IC CPLD 256MC 7.5NS 144TQFP
LNK306G
Power Integrations
IC OFFLINE SWITCH MULT TOP 8SMD
STM8S207MBT6B
STMicroelectronics
IC MCU 8BIT 128KB FLASH 80LQFP